


こんにちは!
産業用ロボットの情報を発信している製造DX.comです。[◎△◎]
人とロボットが助け合って作業をする世界が広がり、半分ロボットのロボイヌも感激しています。
ロボットの安全規格が緩和されてから、協働ロボットの導入が増えてきました。安全性が高いとは言え、安全には十分注意して運用しなければなりません。
産業用ロボットを使用するには、安全規格を遵守しなければなりません。ただし、協働ロボットに関する安全規格は一般的な産業用ロボットとは異なり、作業者レベルで考えた場合にはかなり緩くなっています。
そこで本記事では協働ロボットに関する安全規格について解説し、そのうえで協働ロボットをより安全に運用するポイントについて詳しく解説しました。
協働ロボットを導入する際には、記事を参考にして社内の安全基準なども見直してください。
工場自動化・ロボット導入に関してお悩みがあれば、お気軽に製造DX.comまでお問い合わせください!
多数の企業が参加する弊社独自のコミュニティを駆使して、お悩みに沿った最適なご提案をさせて頂きます。
もくじ
協働ロボットとは?
協働ロボットとは、人間の作業員と協力しながら作業を行う産業用ロボットのこと。従来の産業用ロボットと大きく異なるのは安全性です。人間と協働することが大前提となるため、協働ロボットは作業員と同じ空間で作業することになります。
従来の産業用ロボットは安全柵で囲われていました。しかし、協働ロボットを導入する際に安全柵は不要です。
従来の産業用ロボットと協働ロボットには他にも異なる点があります。詳しくは下記の記事をご覧ください。
>>産業用ロボットと協働ロボットの違い!安全基準の緩和で導入増加
後述しますが、産業用ロボットの安全規格が緩和されたことで、協働ロボットを導入されるケースが急激に増えてきました。
ただし、協働ロボットの安全性が高いとは言え、安全対策は必要です。その中の一つがリスクアセスメント。協働ロボットを導入する際にはリスクアセスメントが必要になります。
それでは、リスクアセスメントについて詳しく見ていきましょう!
協働ロボットのリスクアセスメントについて


協働ロボットを導入する際に必要となるのが、作業員への危険性や有害性の調査です。導入する協働ロボットの危険性を知り、対策を行わなければなりません。危険性や有害性の調査を行うことをリスクアセスメントと言います。
リスクアセスメントを論理的に実行するのに参考となるのが、基本安全規格「ISO 12100」です。ISO 12100には、リスクアセスメントを論理的な実行方法とリスクを低減するための方策が記されています。
リスクアセスメントの具体的な手順は次の通りです。
- 機械の動作制限の決定
- 危険源の特定(同定)
- リスクを見積もる
- リスクの評価
リスクアセスメントは労働安全衛生法においては努力義務という位置付け。ですから、必ずしも実施しなければならないということではありません。しかし、協働ロボットが安全であることを保証するためにも、ぜひ実施してください。
それでは、リスクアセスメントの手順に従い、順に解説していきましょう。
協働ロボットの動作制限を決定する
協働ロボットを導入する前には、協働ロボットを含んだ装置全体の動作制限を行う必要があります。協働ロボットや周辺装置が意図しない使用方法とならないように、制限を決めましょう。
具体的に決定しなければならない項目の例としては以下のとおりです。
- 設置場所の制限
- 動作範囲の制限
- 運転寿命
- 各部品の寿命
- メンテナンスの間隔
設置場所や動作範囲を決定する際には、作業者と協働ロボットなどのレイアウトを検討しなければいけません。協働ロボットは人とロボットが同じスペースで作業をすることになるので、協働スペースの制限を設ける必要があります。
協働ロボット周辺における危険源を特定
協働ロボットの動作制限を決定したら、次はどのような危険源があるかを検討します。作業中の事故を防ぎ安全に生産活動を実施するには、危険源を特定しておかなければなりません。参考にするのは「ISO 12100」に記載されている危険源の一覧表です。一覧表と照らし合わせながら、危険源を特定します。
また、危険源の特定は危険源だけではなく、危険状態や危険事象についての認知も必要です。危険源の例としては、下記のようなものがあります。
- 機械の巻き込み・接触
- 感電
- アーク火災
- 熱源による火傷
- 低温による凍傷
- 騒音・振動障害
- 紫外線や赤外線照射による人体への障害
- 材料物質による呼吸障害や過敏症の発生
- 作業の際に発生する精神的負荷
ISO 12100を参考にしながら、危険源のチェックリストを作成しましょう。
協働ロボットのリスクレベルを見積もる
協働ロボットと周辺装置に関係する危険源のチェックリストを作成したら、それぞれの危険源に対して個々にリスクレベルを見積もります。
リスクレベルを検討する際に必要となるのが下記の2点です。
- 事故が起こった際の重大度(危害のひどさ)
- 危険の発生確率
- 危険性又は有害性に近づく頻度
上記の3点を数値化し、それぞれの値を足し合わせた数値を協働ロボットのリスクレベルとします。
下記3つの画像は、厚生労働省の「シルクアセスメント評価基準(例)」に記載されているものです。それぞれのポイントについては下記の画像を参考にしてください。

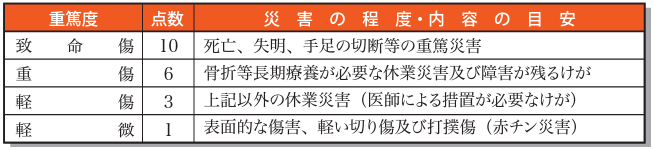
出典:厚生労働省『リスクアセスメント評価基準(例)』

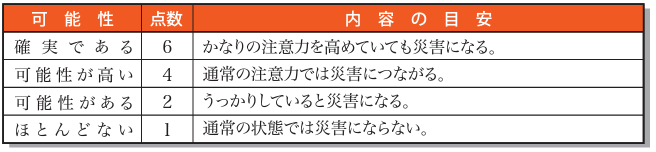
出典:厚生労働省『リスクアセスメント評価基準(例)』


出典:厚生労働省『リスクアセスメント評価基準(例)』
たとえば、重篤度が「致命傷(10)」、発生確率が「可能性がある(2)」、頻度「時々(2)」という場合には、3つのポイントを足し合わせた「14」がリスクレベルとなります。
協働ロボットのリスクを評価
協働ロボットのリスクを見積もったら、それぞれのリスクに対して評価を行います。評価の争点はリスク低減を行うべきか否かです。
リスク評価の結果、許容可能なリスクレベルであれば対策する必要はありません。しかし、リスク低減が必要な場合には3ステップメソッドによるリスク低減の対策が必要です。
3ステップメソッドの手順は以下の3つのステップとなります。
- 本質的安全設計方策
- 安全防護および追加保護方策
- 使用上の情報
上記の1.と2.によってリスクが低減できない場合には、「ラベルを貼る」「取扱説明書に危険情報を掲載する」などの対策が必要です。
リスクアセスメントについては理解できましたが、リスクを低減する基準などは安全規格に記されているのでしょうか?
残念ながら、リスクレベルについては安全規格で名言されていません。しかし、安全規格を知ることで、おおよその基準は理解できるでしょう。
協働ロボットの安全規格について


協働ロボットの安全性に関して下記の3つの安全規格に記載されています。
- ISO 10218-1(JIS B8433-1:2015)
- ISO 10218-2(JIS B 8433-2:2015)
- ISO/TS 15066
ISO 10218はPart1とPart2で構成された、産業用ロボットと特定の危険源についての安全規格です。
また、ISO/TS 15066はISO 10218に記載されている協働ロボットの運転に関する要求事項とガイダンスを補完する標準仕様書になっています。
それぞれについて、もう少し詳しく解説しましょう。
ISO 10218-1は協働ロボットの設計等における規格
ISO 10218-1は協働ロボットを含む産業用ロボットが対象の安全規格です。具体的には下記2点を保証するための要求事項について記載されています。
- 設計上の安全
- 製造上の安全
ISO 10218-2は主にSIerを対象とした安全規格
ISO 10218-2は主にSIer(システムインテグレータ)を対象とした安全規格です。したがって、協働ロボット単体ではなく、ロボットを含む生産ラインについて記載されています。
ISO/TS 15066は協働ロボットの安全要求事項
ISO/TS 15066は協働ロボットに関する安全要求事項が記載されています。ISO/TS 15066の特徴は、ISO 10218-1を補完する形になっているという点です。
ISO/TS 15066とISO 10218-1で定められている要求事項は以下の4点となっています。
- 安全適合の監視停止
- ハンドガイド
- 速度と間隔の監視
- 本質的設計または制御による動力および力の制限
協働ロボットの安全規格はISO 10218-1、ISO 10218-2、ISO/TS 15066の3つを熟知すれば良いということですね。
では最後に、どのように規制が緩和されたのかについて具体的に紹介しておきましょう。
規制緩和によって協働ロボットが身近な存在に

2013年12月に施工された労働安全衛生規則では、安全柵に関する規制を緩和。これにより、80W以上のロボットにおいても、安全条件を満たすことで安全柵が不要となりました。つまり、80W以上の出力を有するロボットにおいても、協働ロボットとして利用可能ということです。
改正前と改正後の規則は以下のとおり。
改正前
- 80W以上のロボットは柵で囲い、人間の作業スペースから隔離すること。
改正後
- ユーザーが、リスクアセスメントに基づく措置を実施し、産業用ロボットに接触することにより労働者に危険の生ずる恐れが無くなったと評価できるときは、柵で囲うことなく人間と協調作業をして良い。
- ISOの規格により設計、製造及び設置された産業用ロボットであり、メーカー・ユーザーが其々「技術ファイル及び適合宣言書」を作成している場合、柵で囲うことなく人間との協調作業をして良い。
労働安全衛生規則:2013年12月
さらに2015年3月には日本工業規格(JIS)が変更され、ロボットの電源についての規制が緩和されました。この規制緩和により、電源の入った状態でロボットに近付くことが可能となります。
改正前と改正後の規則は以下のとおり。
改正前
- ロボットの可動範囲に人が立ち入った場合、ロボットの電源を落として動作停止することが必要である。
改正後
- 適切な制御システムの導入や制御システム故障時の取扱を定めることで、電源を落とさずにロボットを停止することを認める。
- 但し、製造者及び設置者が技術ファイル及び適合宣言書を作成したものであることを条件とする。
日本工業規格(JIS):2015年3月、ISO 10218-1:2011(JIS B 8433-1:2015)
電源入れたままなので、復帰動作なども複雑な条件が不要。より導入が容易になりました。
まとめ
本記事では協働ロボットの安全性について詳しく解説しました。もう一度記事を振り返ってみましょう。
協働ロボットは安全規格が緩和され、導入が容易になりました。しかし、より安全に運用するには、作業員への危険性や有害性の調査が必要です。そして、危険性や有害性の調査を行うのがリスクアセスメントとなります。
リスクアセスメントによって客観的な評価を行い、協働ロボット導入によるリスクを低減させなければなりません。リスクアセスメントの手順は以下の通りです。
- 機械の動作制限の決定
- 危険源の特定(同定)
- リスクを見積もる
- リスクの評価
また、協働ロボットに関係する安全規格は下記の3つでした。
- ISO 10218-1(JIS B8433-1:2015)
- ISO 10218-2(JIS B 8433-2:2015)
- ISO/TS 15066
ISO 10218を補足するものがISO/TS 15066です。協働ロボットの危険源や安全な運転についてのガイダンスなどが詳しく記載されています。
協働ロボットの安全規格が緩和されたのは、主に次の2点です。
- 80W以上の出力を有するロボットも安全性が確保できれば安全柵は不要
- 適切な安全システムであれば電源を落とさずにロボットを停止させても良い
上記の2点により、協働ロボットはより身近な存在となったと言えます。したがって、今後はますます協働ロボットを導入する生産ラインが増えるでしょう。
ロボット導入のお問い合わせは製造DX.comまで
自動化を行うにあたって知っておくべき事項をまとめた「工場自動化ガイド」を作成しました。これから自動化を行っていきたいと考えている企業様は是非参考にしてみてください。
無料で、有料級の限定コンテンツを配信中!
メールマガジン「製造DX.com-Plus」の登録はこちらから
製造DX.comでは、製造現場の生産性向上に役立つ先進的な情報を発信するメールマガジン「製造DX.com-Plus」を配信しています。メールマガジン読者限定の情報を配信しておりますので、ぜひご登録ください!

運営会社について
製造DX.comを運営する株式会社ファースト・オートメーションは製造業に特化した生成AI「SPESILL(スペシル)」を提供しています。製造DX.comでは生成AIに関する研究開発の成果を投稿しています。